S-Exp circle pattern
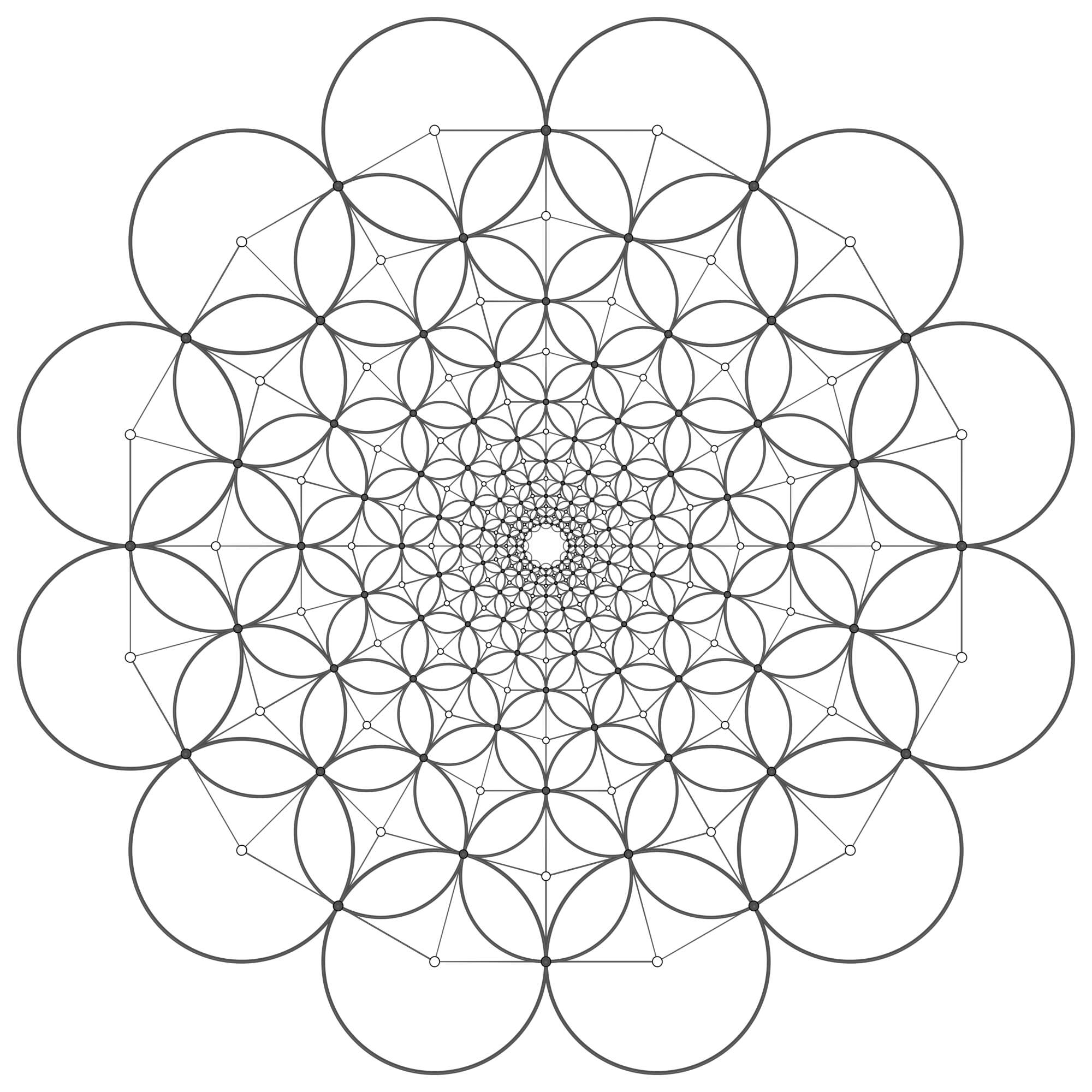
In this example, we will construct an S-Exp orthogonal circle pattern with the combinatorics of a square grid, see e.g. [BP99: Discretization of surfaces and integrable systems]. For its construction we use the explicit formulas given in [BHS06: Minimal surfaces from combinatorics]. The S-Exp circle pattern can be used as Weierstrass data for constructing discrete S-isothermic minimal and maximal catenoids in Euclidean and Lorentz-Minkowski space, as we will do in this example.
You can download the full script
s_exp.py and
an obj file with an example
s_exp.obj.
Setup
We begin by importing required modules, clearing the Blender scene, and defining a function to create the s_exp circle pattern.
import os
import bpy
import numpy as np
import ddg
ddg.blender.scene.clear(deep=True)
ddg.blender.material.clear()
euc = ddg.geometry.euclidean(2)
def s_exp(U, V):
"""
Function to create an s-exp orthogonal circle pattern in the plane.
Uses square grid combinatorics with UxV vertices with the
topology of a cylinder.
The resulting combinatorics will have black and white
vertices (v.color = 'b', v.color = 'w') where white
vertices correspond to circle centers and
black vertices correspond to points of intersection.
Returns
-------
ddg.halfedge.Surface
Halfedge object containing the 2d coordinates in the vertex attribute 'co'.
"""
# Start with ifs grid of cylinder topology and convert it to halfedge
grid_ = ddg.indexedfaceset.grid_with_periodicity((U, V), periodicity=(0, 1))
combinatorics = ddg.indexedfaceset.indexed_face_set_to_surface(grid_)
combinatorics.verts.add_attribute("co")
for v in combinatorics.verts:
v.co = grid_.vertex_attributes["uv"][v.ifs_index]
delattr(combinatorics.verts, "ifs_index")
delattr(combinatorics.faces, "ifs_face_index")
# Bicolor vertices
ddg.halfedge.bicolor_vertices(combinatorics, colors=["w", "b"])
white_verts = [v for v in combinatorics.verts if v.color == "w"]
black_verts = [v for v in combinatorics.verts if v.color == "b"]
# Determine circle centers (see e.g. BHS06: Minimal surfaces from combinatorics)
combinatorics.verts.add_attribute("radius")
rho = 2 * np.pi / V
alph = np.arctanh(0.5 * np.abs(1 - np.exp(2j * rho)))
max_norm = 0.0
for v in white_verts:
i, j = v.co
c = np.exp(alph * i) * np.exp(1j * rho * j)
v.co = np.array([c.real, c.imag])
v.radius = np.sin(rho) * np.abs(c)
max_norm = max(max_norm, np.linalg.norm(v.co))
# Scale to unit disc
if max_norm > 1:
for v in white_verts:
v.co = v.co / max_norm
v.radius = v.radius / max_norm
# Determine touching points for interior vertices and for boundary vertices
for v in black_verts:
out_edges = [e for e in ddg.halfedge.out_edges(v)]
if len(out_edges) == 4:
v1 = out_edges[2].head
v2 = out_edges[0].head
elif len(out_edges) == 3:
out_sorted = sorted(
out_edges, key=lambda e: not ddg.halfedge.is_boundary_vertex(e.head)
)
v1, v2 = out_sorted[0].head, out_sorted[1].head
vec = v2.co - v1.co
v.co = v1.co + v1.radius * vec / np.linalg.norm(vec)
return combinatorics
Construction
Using the previously defined function, we construct a halfedge object storing the circle center and touching point coordinates.
# Parameters that determine the combinatorics
# V must be even to bi-color the vertices.
U, V = 15, 30
assert V % 2 == 0
s_exp_cp = s_exp(U, V)
Visualization
In the visualization step, we compute and display the circles of the orthogonal circle pattern.
# Visualization
mats = [
ddg.blender.material.material(color=(0.0, 0.0, 0.0)),
ddg.blender.material.material(color=(1.0, 1.0, 1.0)),
]
ddg.blender.edges(s_exp_cp, "combinatorics", radius=0.005, material=mats[0])
for v in s_exp_cp.verts:
mat = mats[0] if v.color == "b" else mats[1]
ddg.blender.convert(
ddg.geometry.Point([*v.co, 1]),
f"pt_{v.index}",
point_radius=np.linalg.norm(v.co) ** 0.5 / 100,
material=mat,
)
if v.color == "w":
sphere = euc.sphere([*v.co, 1], v.radius)
sphere_array = ddg.arrays.from_quadric_sphere(sphere, 10)
ddg.blender.convert(
sphere_array,
f"sphere_{v.index}",
material=mats[0],
curve_radius=np.linalg.norm(v.co) ** 0.5 / 250,
)
Export OBJ
We can also export an OBJ file for later use. You can download it here:
s_exp.obj.
We convert the coordinates to 3d coordinates with z=0.
# Export obj
for v in s_exp_cp.verts:
v.co = np.array([*v.co, 0.0])
dir = os.path.dirname(os.path.realpath(__file__))
ddg.conversion.obj.halfedge.hds_to_obj(s_exp_cp, filename=f"{dir}/s_exp.obj")